



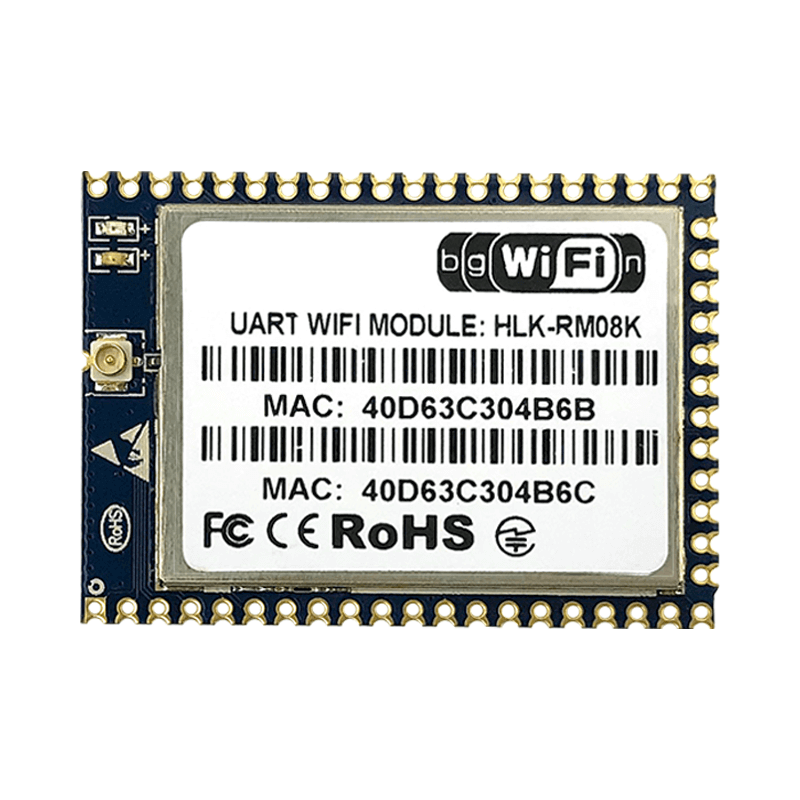
RM08K|串口转WiFi路由模组
MT7688KN方案

350W 机壳电源
350W 机壳电源 | 350L05/350L12/350L15/350L24/350L36/350L48

200W 机壳电源
200L05/200L12/200L15/200L24/200L36/200L48

ACDC电源模块 | 10W 超小型系列模块电源 10M03
10M03/10M05/10M09/10M12/10M15/10M24
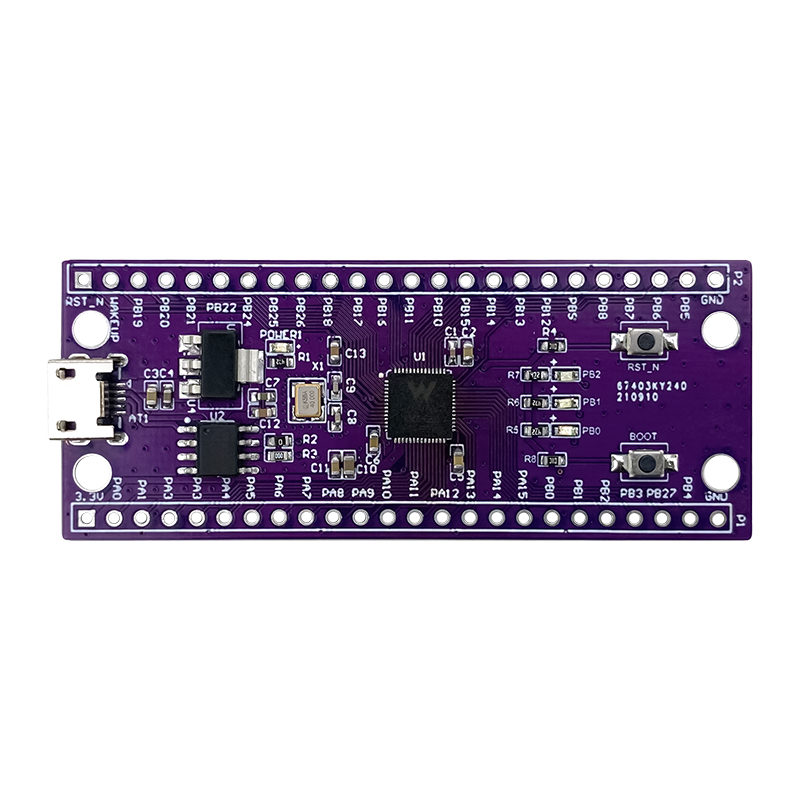
W806开发板|物联网单片机系统板
集成32位XT804处理器@240MHz/QFN56封装








